ņĮśĒģÉņĖĀ
ņīżļōżņØä ņ£äĒĢ£ ļŗżņ¢æĒĢ£ ņĀĢļ│┤ļź╝ ņĀ£Ļ│ĄĒĢ®ļŗłļŗż.
ĻĖĆņō░ĻĖ░
ņīżļōżņØä ņ£äĒĢ£ ļŗżņ¢æĒĢ£ ņĀĢļ│┤ļź╝ ņĀ£Ļ│ĄĒĢ®ļŗłļŗż.
ĻĖĆņō░ĻĖ░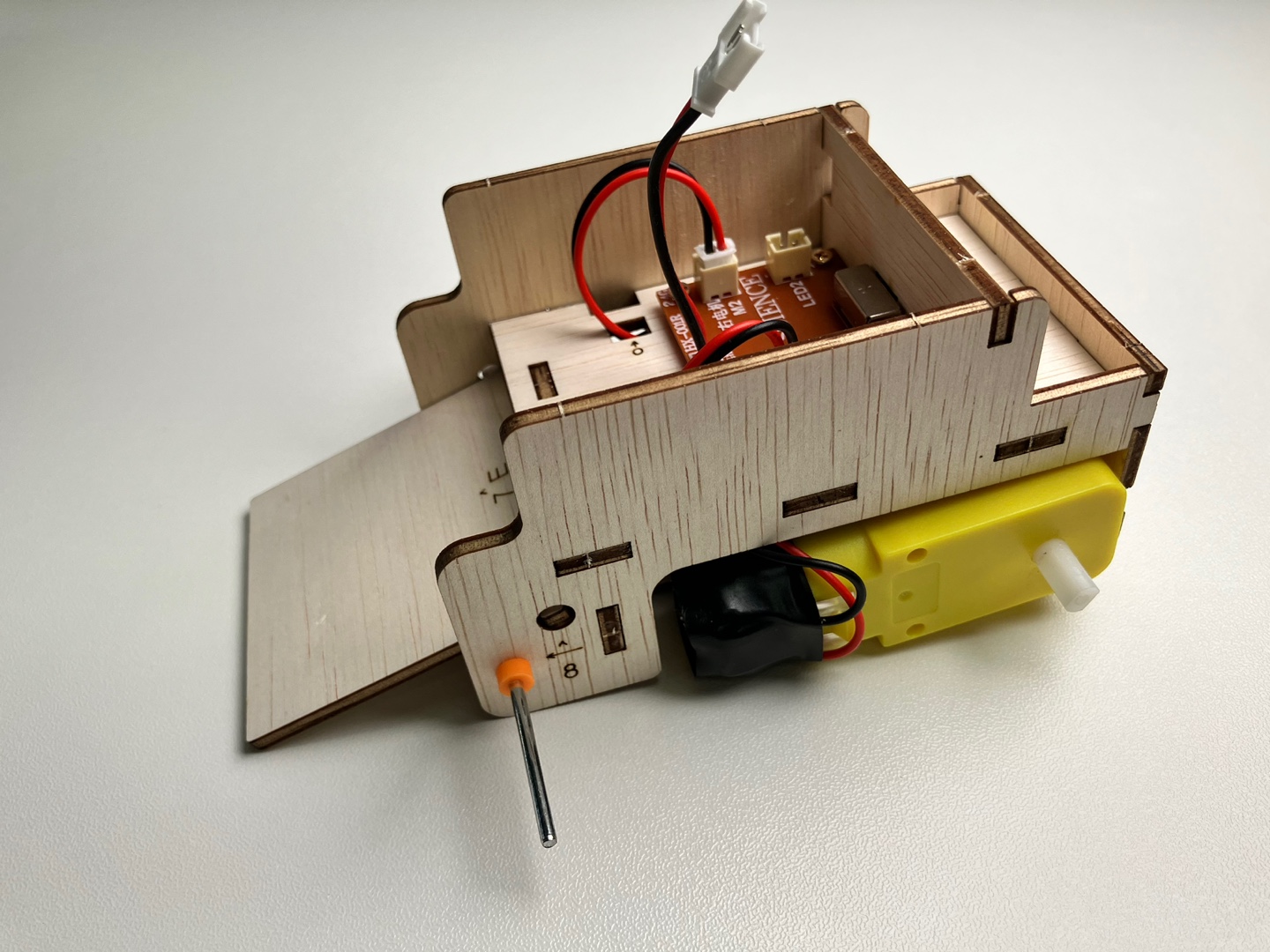

ņŚÉļööĒä░
2025ļģä 04ņøö 15ņØ╝
ņ░ĮņØś STEM
ļ░®Ļ│╝Ēøä
ĒĢ£ņŻ╝
ŌĆŗ
< RC ļŗ¼ĒāÉņé¼ ļĪ£ļ┤ć ņĮöļ”¼ >
1. ļé┤ ņåÉņ£╝ļĪ£ ņ¦üņĀæ ļ¦īļō£ļŖö RC ļĪ£ļ┤ćņ×ģļŗłļŗż.
2. Ļ░äļŗ©ĒĢśĻ│Ā ņē¼ņÜ┤ ņĪ░ņóģ ļ░®ļ▓Ģņ£╝ļĪ£ ņ×¼ļ»Ėņ׳Ļ▓ī ņ”ÉĻĖĖ ņłś ņ׳ņŖĄļŗłļŗż.
3. ļ¬®Ļ│╝ ņåÉ ļō▒ ļööĒģīņØ╝ĒĢ£ ļĪ£ļ┤ć ļööĒģīņØ╝ņØä ļ¦īļéśļ│┤ņäĖņÜö.
4. ņ£ĀņŚ░ĒĢ£ Ļ│Āļ¼┤ ņ▓┤ņØĖņ£╝ļĪ£ ņśżļź┤ļ¦ēĻĖĖ, ļé┤ļ”¼ļ¦ēĻĖĖ ņ¢┤ļööļōĀ Ļ░ł ņłś ņ׳ļŖö ļĪ£ļ┤ćņ×ģļŗłļŗż.
[ņżĆļ╣äĒĢśĻĖ░]
ņĮöļ”¼ņĢä ņé¼ņØ┤ņ¢ĖņŖżņØś RC ļŗ¼ĒāÉņé¼ ļĪ£ļ┤ć ņĮöļ”¼ļŖö ņĪ░ļ”ĮņśüņāüņØä ņĀ£Ļ│ĄĒĢśĻ│Ā ņ׳ņŖĄļŗłļŗż.
ņāüĒÆł ĒżņןņŚÉ ļČĆņ░®ļÉ£ ņŖżĒŗ░ņ╗żņØś QRņĮöļō£ļź╝ ņŖżļ¦łĒŖĖĒÅ░ ņ╣┤ļ®öļØ╝ļĪ£ ņŖżņ║öĒĢśĻ▒░ļéś
ņĢäļל ļ░öļĪ£Ļ░ĆĻĖ░ ĒÄśņØ┤ņ¦ĆņŚÉņä£ ņśüņāüņØä ĒÖĢņØĖĒĢ┤ņŻ╝ņäĖņÜö.
RC ļŗ¼ĒāÉņé¼ ļĪ£ļ┤ć ņĮöļ”¼ ĒĢśļČĆ ņ░©ņ▓┤ ņĪ░ļ”Įņśüņāü ļ░öļĪ£Ļ░ĆĻĖ░
ņĮöļ”¼ļŖö ņ┤Ø 4Ļ░£ņØś ņĪ░ļ”Į ņśüņāüņ£╝ļĪ£ ļéśļłäņ¢┤ņĀĖ ņ׳ņŖĄļŗłļŗż.
ņśżļŖśņØĆ ĻĘĖ ņ▓½ ņł£ņä£ļĪ£ ļĪ£ļ┤ć ņĮöļ”¼Ļ░Ć ņøĆņ¦üņØ╝ ņłś ņ׳ļÅäļĪØ ĒĢ┤ņŻ╝ļŖö ĒĢśļČĆ ņ░©ņ▓┤ļź╝ ļ¦īļōżņ¢┤ļ│┤Ļ▓ĀņŖĄļŗłļŗż.
ļČĆĒÆłĻ│╝ ņżĆļ╣äļ¼╝ņØä ĒÖĢņØĖĒĢ®ļŗłļŗż.

ŌĆ╗ ņÜ░ļō£ Ēī©ļäÉņØś Ļ░ü ļČĆĒÆłņŚÉļŖö 1ļČĆĒä░ ņł½ņ×ÉĻ░Ć ņĀüĒśĆ ņ׳ņŖĄļŗłļŗż. ņł£ņä£ļīĆļĪ£ ļ¢╝ņ¢┤ļé┤ņ¢┤ ņĪ░ļ”ĮņØä ņŗ£ņ×æĒĢ®ļŗłļŗż.
ŌĆ╗ ļČĆĒÆłņŚÉ ņĀüĒ×ī ņóī ┬Ę ņÜ░ ļ░®Ē¢źņØä ĒÖĢņØĖĒĢśņŚ¼ ņĪ░ļ”ĮĒĢ®ļŗłļŗż.
ŌĆ╗ ļČĆĒÆłņŚÉ Ēæ£ņŗ£ļÉ£ ^ ļ░®Ē¢źņØ┤ ņ£äļĪ£ Ē¢źĒĢśļÅäļĪØ ĒĢśņŚ¼ ņĪ░ļ”ĮĒĢ®ļŗłļŗż.
ŌĆ╗ Ļ░ü ļČĆĒÆłņØś ņĀæņ░® ļČĆņ£äņŚÉ ļ¬®Ļ│ĄĒÆĆņØä ņ¢ćĻ▓ī ļ░öļź┤Ļ│Ā, ņĀæņ░®ĒĢ£ ļČĆņ£äĻ░Ć ļ¦łļź┤ļÅäļĪØ ņ×Āņŗ£ ĻĖ░ļŗżļ”Įļŗłļŗż.


#1~3. ņóī 1, 2, 3 ļČĆĒÆłņØä Ļ▓╣ņ│É ļ¬®Ļ│ĄĒÆĆņØä ņØ┤ņÜ®ĒĢśņŚ¼ ļČÖņŚ¼ņżŹļŗłļŗż.
3ļ▓łņØ┤ Ļ░Ćņן ņĢäļל, ĻĘĖ ņ£äņŚÉ 2ļ▓ł, 1ļ▓łņØ┤ Ļ░Ćņן ņ£äļĪ£ ņśżĻ▓ī ĒĢ®ļŗłļŗż.
ņÜ░ 1, 2, 3 ļČĆĒÆłļÅä ļÅÖņØ╝ĒĢśĻ▓ī ļČÖņŚ¼ņżŹļŗłļŗż.


#4. 3Ļ▓╣ņ£╝ļĪ£ ļČĆņ░®ĒĢ£ ņóī, ņÜ░ ļČĆĒÆłņØä 4ļ▓łņØś ņóī, ņÜ░ ĻĄ¼ļ®ŹņŚÉ ļü╝ņøī ņĪ░ļ”ĮĒĢ®ļŗłļŗż.


#5~6. 5ļ▓ł, 6ļ▓ł ļČĆĒÆłņŚÉļÅä ņ░©ļĪĆļīĆļĪ£ ļü╝ņøī ņĪ░ļ”ĮĒĢ®ļŗłļŗż.


#7~8. 8ļ▓ł ļČĆĒÆł ļæÉ Ļ░£ņżæ ĒĢ£ ņ¬ĮņØä ļ©╝ņĀĆ ņĪ░ļ”ĮĒĢ£ Ēøä,
7ļ▓ł ļČĆĒÆłņØä 8ļ▓ł ļČĆĒÆł ņé¼ņØ┤ņŚÉ ļü╝ņÜ┤ Ēøä ļ░śļīĆņ¬Į 8ļ▓ł ļČĆĒÆłņØä ļČĆņ░®ĒĢ®ļŗłļŗż.
7ļ▓ł ļČĆĒÆłņØś ļÅīņČ£ļÉ£ ļČĆļČäņØä 8ļ▓ł ļČĆĒÆłņØś ĻĄ¼ļ®ŹņŚÉ ļü╝ņøüļŗłļŗż.

ŌĆŗ#9. 9ļ▓ł ļČĆĒÆłņØä 5ļ▓ł ļČĆĒÆłņŚÉ ņĪ░ļ”ĮĒĢ®ļŗłļŗż. ņØ┤ ļĢī ņ¢æ ņ¬Į 8ļ▓ł ļČĆĒÆłņØś ĒÖłņŚÉ Ļ▒Ėļ”¼ļÅäļĪØ ĒĢ®ļŗłļŗż.

ļ®öņØĖļ│┤ļō£ļź╝ ņĪ░ļ”ĮĒĢĀ ņ░©ļĪĆņ×ģļŗłļŗż. ņ×æņØĆ ļ│╝ĒŖĖņÖĆ ļō£ļØ╝ņØ┤ļ▓äļź╝ ņżĆļ╣äĒĢ®ļŗłļŗż.


ļ®öņØĖļ│┤ļō£ņØś ņŖżņ£äņ╣śļź╝ 9ļ▓ł ļČĆĒÆłņØś ĻĄ¼ļ®ŹņŚÉ ļü╝ņÜ┤ Ēøä
ļ®öņØĖļ│┤ļō£ ļäż ĻĘĆĒēüņØ┤ņØś ĻĄ¼ļ®ŹņØä ņ×æņØĆ ļ│╝ĒŖĖļĪ£ Ļ│ĀņĀĢĒĢ®ļŗłļŗż.
ļ│╝ĒŖĖļŖö ĒĢ£ ļæÉ ļ░öĒĆ┤ ņĀĢļÅäļ¦ī ļÅīļĀż ļ®öņØĖļ│┤ļō£Ļ░Ć ņ░©ņ▓┤ņŚÉņä£ ņé┤ņ¦Ø ļ¢Ā ņ׳ļÅäļĪØ ņĪ░ļ”ĮĒĢ®ļŗłļŗż.

ļ¬©Ēä░ļź╝ ņĪ░ļ”ĮĒĢĀ ņ░©ļĪĆņ×ģļŗłļŗż. ļ¬©Ēä░ ļæÉ Ļ░£ņÖĆ ĻĖ┤ ļ│╝ĒŖĖ 4Ļ░£, ļō£ļØ╝ņØ┤ļ▓äļź╝ ņżĆļ╣äĒĢ®ļŗłļŗż.
ļ¬©Ēä░ ļæÉ Ļ░£ļŖö ņóī, ņÜ░ ĻĄ¼ļČä ņŚåņØ┤ ļÅÖņØ╝ĒĢ®ļŗłļŗż.


ļ¬©Ēä░ ņ╝ĆņØ┤ļĖöņØä 5ļ▓ł ļČĆĒÆłņØś O Ēæ£ņŗ£Ļ░Ć ļÉśņ¢┤ ņ׳ļŖö ĻĄ¼ļ®Źņ£╝ļĪ£ ļ░æņŚÉņä£ ņ£äļĪ£ ĒåĄĻ│╝ņŗ£ĒéĄļŗłļŗż.

ļ¬©Ēä░ņØś ņ¢æ ļ®┤ņØä ļ│┤ļ®┤ ļģĖļ×æņāē ļÅīĻĖ░Ļ░Ć ņ׳ļŖö ļ®┤Ļ│╝ ņŚåļŖö ļ®┤ņØ┤ ņ׳ņŖĄļŗłļŗż.
ļÅīĻĖ░Ļ░Ć ņ׳ļŖö ļ®┤ņØä ņĪ░ļ”ĮņżæņØĖ ņ░©ņ▓┤ ņ¬Įņ£╝ļĪ£ Ē¢źĒĢśĻ▓ī ĒĢśņŚ¼ ĻĄ¼ļ®ŹņŚÉ ļ¦×Ļ▓ī ļü╝ņÜ┤ Ēøä
ĻĖ┤ ļ│╝ĒŖĖ ļæÉ Ļ░£ļź╝ ļ¬©Ēä░ņŚÉ ļü╝ņøī ņ▓┤Ļ▓░ĒĢ®ļŗłļŗż.

ļ░śļīĆņ¬ĮņŚÉļÅä Ļ░ÖņØĆ ļ░®ļ▓Ģņ£╝ļĪ£ ļ¬©Ēä░ļź╝ ņĪ░ļ”ĮĒĢśĻ│Ā
ļæÉ Ļ░£ņØś ļ¬©Ēä░ ņ╝ĆņØ┤ļĖöņØĆ Ļ░üĻ░ü ļ®öņØĖļ│┤ļō£ņØś M1, M2 ĒżĒŖĖņŚÉ ņŚ░Ļ▓░ĒĢ®ļŗłļŗż.

ņ░©ņ▓┤ņØś ņĀäļ®┤ņŚÉ ņČĢ(ņćĀļ¦ēļīĆ)ņØä ņĪ░ļ”ĮĒĢĀ ņ░©ļĪĆņ×ģļŗłļŗż.
ņČĢņØś ĒĢ£ ņ¬Į ļüØņŚÉ ĒöīļØ╝ņŖżĒŗ▒ Ļ│ĀņĀĢļ¦üņØä ĻĮéĻ│Ā
ņÜ░ļō£ Ēī©ļäÉņØś ņĖĪņĀĢņ×Éļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ ĻĘĖ ĻĖĖņØ┤ļ¦īĒü╝ Ļ│ĀņĀĢļ¦üņØä ļ░Ćņ¢┤ ļäŻņ¢┤ ņ£äņ╣śļź╝ ņĪ░ņĀĢĒĢ®ļŗłļŗż.


Ļ│ĀņĀĢļ¦üņØä ĻĖ░ņżĆņ£╝ļĪ£ ņČĢņØś ĻĖ┤ ņ¬ĮņØä ņ░©ņ▓┤ ņśåļ®┤ 8ļ▓ł ļČĆĒÆłņØś ĻĄ¼ļ®ŹņŚÉ ļü╝ņøüļŗłļŗż.
ņØ┤ ļĢī ņøĆņ¦üņØ┤ļŖö 7ļ▓ł ļČĆĒÆłņØĆ ņ£äļĪ£ ņś¼ļØ╝Ļ░ä ņāüĒā£ņŚ¼ņĢ╝ ĒĢ®ļŗłļŗż.

ļ░śļīĆņ¬ĮņŚÉļÅä ņĖĪņĀĢņ×Éļź╝ ņØ┤ņÜ®ĒĢśņŚ¼ Ļ│ĀņĀĢļ¦üņØä ļü╝ņøī ņČĢņØä Ļ│ĀņĀĢņŗ£ĒéĄļŗłļŗż.
ņČĢņŚÉļŖö ļ░öĒĆ┤ļź╝ ņŚ░Ļ▓░ĒĢśņŚ¼ ņøĆņ¦üņØ┤ļÅäļĪØ ĒĢ┤ņĢ╝ ĒĢśļŗł ļäłļ¼┤ ĻĮē ņĪ░ņØ┤ņ¦Ć ņĢŖļÅäļĪØ ĒĢ®ļŗłļŗż.

ņĮöļ”¼ ņĪ░ļ”Į ņ▓½ ņł£ņä£ņØĖ ĒĢśļČĆ ņ░©ņ▓┤ ņĪ░ļ”ĮņØĆ ņÖäļŻīļÉśņŚłņŖĄļŗłļŗż.
ļŗżņØī ņł£ņä£ļĪ£ ļäśņ¢┤Ļ░ĆĻĖ░ ņĀäņŚÉ ļ¬©Ēä░Ļ░Ć ņĀĢņāüņĀüņ£╝ļĪ£ ņ×æļÅÖĒĢśļŖöņ¦Ć ĒÖĢņØĖĒĢ┤ļ│┤Ļ▓ĀņŖĄļŗłļŗż.
ņ░©ņ▓┤ņØś ļ®öņØĖļ│┤ļō£ņÖĆ ņĪ░ņóģĻĖ░ ļ®öņØĖļ│┤ļō£ņŚÉ Ļ░üĻ░ü ļ░░Ēä░ļ”¼ļź╝ ņŚ░Ļ▓░ĒĢśņŚ¼ ņĀäņøÉņØä ņ╝£Ļ│Ā
ņĪ░ņóģĻĖ░ ļĀłļ▓äļź╝ ņøĆņ¦üņŚ¼ ļ¬©Ēä░Ļ░Ć ņĀĢņāüņĀüņ£╝ļĪ£ ņøĆņ¦üņØ┤ļ®┤ ņĪ░ļ”Į ņä▒Ļ│Ąņ×ģļŗłļŗż!
ļŗżņØī ņ░©ļĪĆļŖö ļ░öĒĆ┤ļź╝ ņĀ£ņ×æĒĢśĻĖ░ ņ£äĒĢ£ ņ¦Ćņ¦ĆļīĆ ņĪ░ļ”Įļŗłļŗż.
ļ░öļĪ£Ļ░ĆĻĖ░ >>> RC ļŗ¼ĒāÉņé¼ ļĪ£ļ┤ć ņĮöļ”¼ ļ¦īļōżĻĖ░ 2 - ļ░öĒĆ┤ ņĀ£ņ×æ ņ¦Ćņ¦ĆļīĆ














