ВйўьЁљВИа
ВїцвЊцВЮё ВюёьЋю вІцВќЉьЋю ВаЋв│┤вЦ╝ ВаюЖ│хьЋЕвІѕвІц.
ЖИђВЊ░ЖИ░
ВїцвЊцВЮё ВюёьЋю вІцВќЉьЋю ВаЋв│┤вЦ╝ ВаюЖ│хьЋЕвІѕвІц.
ЖИђВЊ░ЖИ░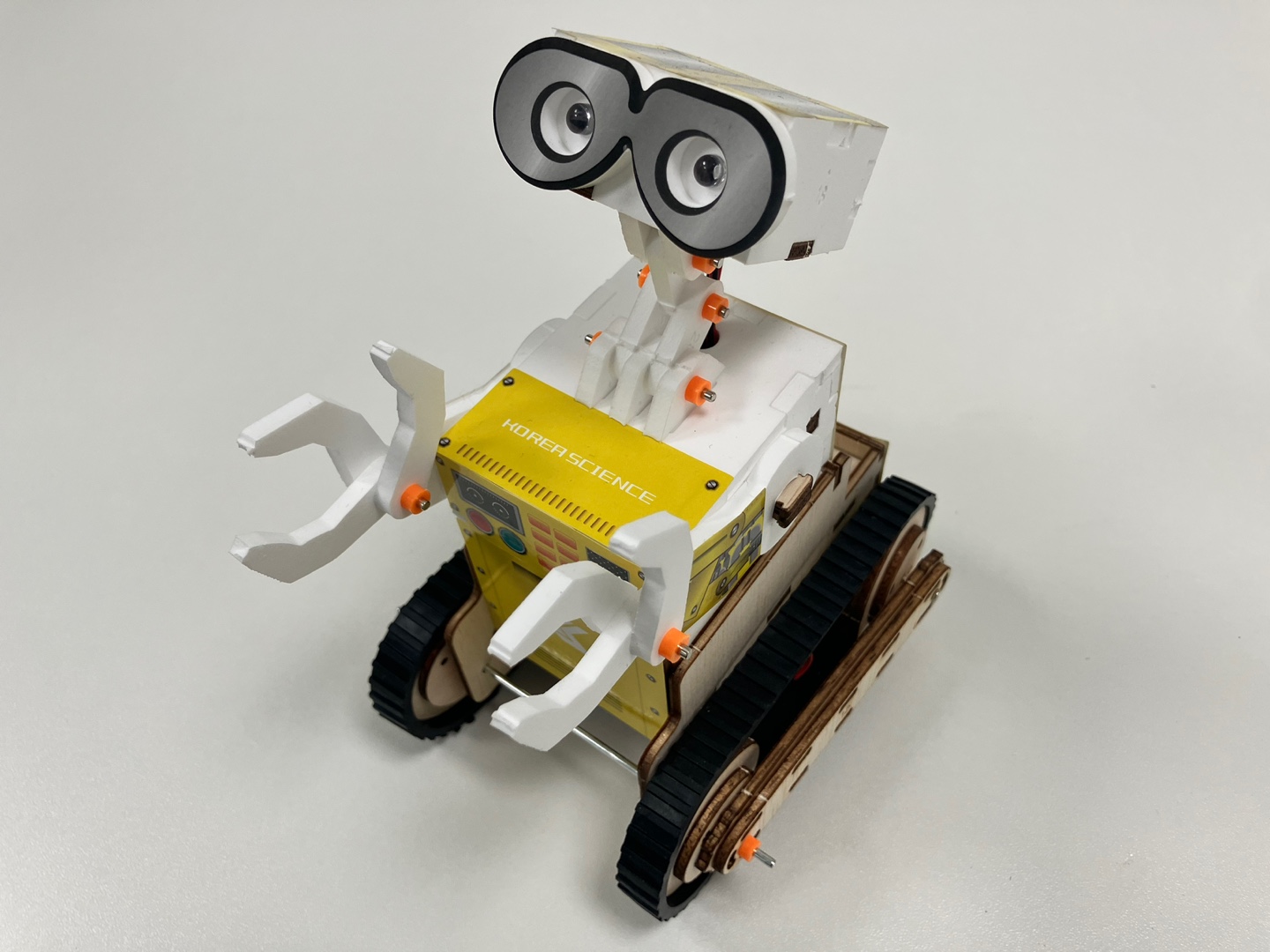

ВЌљвћћьё░
2025вЁё 04ВЏћ 24ВЮ╝
В░йВЮў STEM
в░ЕЖ│╝ьЏё
ьЋюВБ╝
[Вцђв╣ёьЋўЖИ░]
ВйћвдгВЋёВѓгВЮ┤ВќИВіцВЮў RC вІгьЃљВѓг вАюв┤Є Вйћвдгвіћ ВА░вдйВўЂВЃЂВЮё ВаюЖ│хьЋўЖ│а ВъѕВіхвІѕвІц.
ВЃЂьњѕ ьЈгВъЦВЌљ вХђВ░Евљю ВіцьІ░В╗цВЮў QRВйћвЊювЦ╝ ВіцвДѕьіИьЈ░ В╣┤вЕћвЮ╝вАю ВіцВ║ћьЋўЖ▒░вѓў
ВЋёвъў в░ћвАюЖ░ђЖИ░ ьјўВЮ┤ВДђВЌљВёю ВўЂВЃЂВЮё ьЎЋВЮИьЋ┤ВБ╝ВёИВџћ.
RC вІгьЃљВѓг вАюв┤Є Вйћвдг вфИьєх ВА░вдйВўЂВЃЂ в░ћвАюЖ░ђЖИ░
(ВА░вдй ВўЂВЃЂ в▓ѕьўИвіћ 2в▓ѕВъЁвІѕвІц.)
Вйћвдгвіћ В┤Ю вёц Ж░юВЮў ВА░вдй ВўЂВЃЂВю╝вАю вѓўвѕёВќ┤ВаИ ВъѕВіхвІѕвІц.
ВўцвіўВЮђ в░ћьђ┤вЦ╝ в╣ёвА»ьЋ┤ В▓Ф ВІюЖ░ёВЌљ ВаюВъЉьЋю ьЋўвХђ В░еВ▓┤вЦ╝ ВаюВЎИьЋю
вфевЊа вХђВюёвЦ╝ ВаюВъЉьЋўЖ│а Ж░Ђ вХђВюёвЦ╝ ьЋЕВ▓┤ьЋ┤ в│┤Ж▓аВіхвІѕвІц.
ЖиИ ВаёВЌљ,
в░ћьђ┤вЦ╝ ВаюВъЉьЋўЖИ░ ВюёьЋ┤Вёювіћ в░ћьђ┤ ВаюВъЉ ВДђВДђвїђвЦ╝ ве╝Вађ вДївЊцВќ┤ВЋ╝ ьЋЕвІѕвІц.
в░ћьђ┤ ВаюВъЉ ВДђВДђвїђ вДївЊцЖИ░віћ ВЋёвъў ьјўВЮ┤ВДђвЦ╝ В░ИЖ│аьЋ┤ВБ╝ВёИВџћ!
RC вІгьЃљВѓг вАюв┤Є Вйћвдг вДївЊцЖИ░ - в░ћьђ┤ ВаюВъЉ ВДђВДђвїђ
ВЮ┤Ваю в│ИЖ▓ЕВаЂВю╝вАю в░ћьђ┤ВЎђ вфИьєхВЮё ВаюВъЉьЋ┤в│┤Ж▓аВіхвІѕвІц.
вХђьњѕЖ│╝ Вцђв╣ёвг╝ВЮё ьЎЋВЮИьЋЕвІѕвІц.

Рђ╗ Вџ░вЊю ьїевёљВЮў Ж░Ђ вХђьњѕВЌљвіћ 1вХђьё░ ВѕФВъљЖ░ђ ВаЂьўђ ВъѕВіхвІѕвІц. ВѕюВёювїђвАю вќ╝Вќ┤вѓ┤Вќ┤ ВА░вдйВЮё ВІюВъЉьЋЕвІѕвІц.
Рђ╗ вХђьњѕВЌљ ВаЂьъї Вбї ┬и Вџ░ в░ЕьќЦВЮё ьЎЋВЮИьЋўВЌг ВА░вдйьЋЕвІѕвІц.
Рђ╗ вХђьњѕВЌљ ьЉюВІювљю ^ в░ЕьќЦВЮ┤ ВюёвАю ьќЦьЋўвЈёвАЮ ьЋўВЌг ВА░вдйьЋЕвІѕвІц.
Рђ╗ Ж░Ђ вХђьњѕВЮў ВаЉВ░Е вХђВюёВЌљ вфЕЖ│хьњђВЮё ВќЄЖ▓ї в░ћвЦ┤Ж│а, ВаЉВ░ЕьЋю вХђВюёЖ░ђ вДѕвЦ┤вЈёвАЮ ВъаВІю ЖИ░вІцвдйвІѕвІц.
[в░ћьђ┤ ВА░вдйьЋўЖИ░]
в░ћьђ┤віћ Вџ░вЊю ьїевёљВЮё ВЌгвЪг Ж░ю Ж▓╣В│љВёю вДївЊцЖ▓ї вљЕвІѕвІц.
ВЋъв░ћьђ┤ ВаюВъЉВЌљвіћ 10в▓ѕ вХђьњѕ вЉљ Ж░юВЎђ 11в▓ѕ вХђьњѕВЮ┤ вЉљ Ж░юВћЕ ьЋёВџћьЋЕвІѕвІц. (Ж░Ђ вЉљ ВїЇВЮё Вцђв╣ёьЋЕвІѕвІц.)
ВЋъв░ћьђ┤ вХђьњѕВЮё вХђВ░ЕьЋўвіћ ВѕюВёювіћ ВЋёвъўВЌљВёювХђьё░ 10 РђЊ 11 РђЊ 11 РђЊ 10 ВъЁвІѕвІц.

#10. 10в▓ѕ вХђьњѕ ьЋўвѓўвЦ╝ в░ћьђ┤ ВДђВДђвїђВЮў ЖхгвЕЇВЌљ вЂ╝ВЏЂвІѕвІц.
ВЮ┤ вЋї 10в▓ѕ вХђьњѕВЮў ^ в░ЕьќЦЖ│╝ в░ћьђ┤ ВаюВъЉ ВДђВДђвїђ вѓаЖ░юВЮў ^ в░ЕьќЦВЮ┤ ВЮ╝В╣ўьЋўвЈёвАЮ ьЋЕвІѕвІц.
ЖиИ ВюёВЌљ вфЕЖ│хьњђВЮё в░ювЮ╝ВцЇвІѕвІц. Ж░ђВџ┤вЇ░ ЖхгвЕЇЖ│╝ ВёИ Ж░юВЮў ВЄа ВХЋВЮё ьћ╝ьЋ┤ в░ћвЦ┤вЈёвАЮ ьЋЕвІѕвІц.

#11. ьњђВЮё в░ћвЦИ 10в▓ѕ вХђьњѕ ВюёВЌљ 11в▓ѕ вХђьњѕВЮё ЖйѓВЋё вХЎВъЁвІѕвІц.
ЖиИ ВюёВЌљ вфЕЖ│хьњђВЮё в░ћвЦ┤Ж│а вЉљ в▓ѕВДИ 11в▓ѕ вХђьњѕВЮё вХЎВъЁвІѕвІц.

вІцВІю ьњђВЮё в░ћвЦ┤Ж│а вДѕВДђвДЅ 10в▓ѕ вХђьњѕВЮё ЖйѓВЋё вХЎВъЁвІѕвІц.

ВДђВДђвїђВЌљВёю в░ћьђ┤вЦ╝ в╣╝ вѓ╝ В░евАђВъЁвІѕвІц.
ВДђВДђвїђвЦ╝ вњцВДЉВќ┤ в░ћвІЦВЌљ вїђЖ│а вѓаЖ░ювЦ╝ в░ђВќ┤ в░ћьђ┤вЦ╝ ВЄа ВХЋ вЂЮ вХђвХёВю╝вАю в░ђВќ┤вЃЁвІѕвІц.
РђІ

вѓаЖ░ю ВќЉ ВфйВЮё ьЋю ВєљВю╝вАю ВъАЖ│а вІцвЦИ ВєљВю╝вАю ВДђВДђвїђ в░ЋВіцвЦ╝ вІ╣Ж▓е в░ћьђ┤ВЎђ вХёвдгВІюьѓхвІѕвІц.
ВДђВДђвїђ вѓаЖ░ювЦ╝ ВДђВДђвїђВЌљ ЖйѓЖ│а вЈЎВЮ╝ьЋю в░Ев▓ЋВю╝вАю в░ўвїђВфй ВЋъв░ћьђ┤вЈё вДївЊГвІѕвІц.
вњив░ћьђ┤ ВаюВъЉВЌљвіћ 10в▓ѕ ьЋю Ж░ю, 12в▓ѕ вЉљ Ж░ю, 13в▓ѕ ьЋю Ж░юЖ░ђ ьЋёВџћьЋЕвІѕвІц. (Ж░Ђ вЉљ ВїЇВЮё Вцђв╣ёьЋЕвІѕвІц.)
вњцв░ћьђ┤ вХђьњѕВЮё ВА░вдйьЋўвіћ ВѕюВёювіћ ВЋёвъўВЌљВёювХђьё░ 13 РђЊ 12 РђЊ 12 РђЊ 10 ВъЁвІѕвІц.

ВЋъв░ћьђ┤ВЎђ вЈЎВЮ╝ьЋю в░ЕВІЮВю╝вАю 13в▓ѕ вХђьњѕВЮё Ж░ђВъЦ ВЋёвъўВЌљ,
12в▓ѕ вХђьњѕ вЉљ Ж░ювЦ╝ Ж░ђВџ┤вЇ░ВЌљ,
10в▓ѕ вХђьњѕВЮ┤ Ж░ђВъЦ ВюёВЌљ ВўцвЈёвАЮ ВДђВДђвїђВЌљ ЖйѓВЋёВцЇвІѕвІц.

вфЕЖ│хьњђвАю вХђВ░ЕьЋўВЌг в░ћьђ┤ вЉљ Ж░ювЦ╝ ВаюВъЉьЋўЖ│а, ВДђВДђвїђВЌљВёю вХёвдгьЋЕвІѕвІц.
ВЋъв░ћьђ┤ВЎђ вњив░ћьђ┤ Ж░Ђ 2Ж░юВћЕ В┤Ю вёцЖ░юВЮў в░ћьђ┤вЦ╝ вДївЊцВЌѕВіхвІѕвІц.

В▓Фв▓ѕВДИ ВІюЖ░ёВЌљ ВА░вдйьЋю В░еВ▓┤ВЌљ в░ћьђ┤вЦ╝ ВА░вдйьЋа В░евАђВъЁвІѕвІц.
14в▓ѕЖ│╝ 15в▓ѕ вХђьњѕ, ьЋўвХђ В░еВ▓┤, ВъЉВЮђ ВЄавДЅвїђ, Ж│аВаЋ вДЂ, вг┤ьЋюЖХцвЈёвЦ╝ Вцђв╣ёьЋЕвІѕвІц.

#14~15. ВЋъ вњивЕ┤ВЮ┤ вўЉЖ░ЎВЮ┤ ВЃЮЖИ┤ ВЋъв░ћьђ┤вЦ╝ В░еВ▓┤ВЮў ВЄа ВХЋ ьЋю ВфйВЌљ вЂ╝Вџ░Ж│а,
ЖиИ ВюёВЌљ 14в▓ѕ, 15в▓ѕ вХђьњѕВЮё Ж▓╣В│љВёю вЂ╝Вџ┤ ьЏё, Ж│аВаЋвДЂВЮё вЂ╝ВЏї Ж│аВаЋьЋЕвІѕвІц.
Ж│аВаЋвДЂВЮђ вёѕвг┤ ЖйЅ ВА░ВЮ┤ВДђ ВЋіЖ│а ВЋйЖ░ё віљВіеьЋўЖ▓ї вЂ╝ВЏї в░ћьђ┤Ж░ђ ВЏђВДЂВЮ╝ Вѕў ВъѕвЈёвАЮ ьЋЕвІѕвІц.

вфеьё░ВЮў ьЋўВќђВЃЅ ВХЋВЌљ вњив░ћьђ┤вЦ╝ вЂ╝ВЏЂвІѕвІц. вњив░ћьђ┤віћ ьЋю Вфй вЕ┤ВЮў ЖхгвЕЇВЮ┤ ВѓгЖ░ЂьўЋ вфеВќЉВъЁвІѕвІц.
ВЋъв░ћьђ┤ВЌљ вЂ╝ВЏавЇў 14в▓ѕ, 15в▓ѕ вХђьњѕЖ│╝ вњив░ћьђ┤ВЮў Ж░ђВџ┤вЇ░ ЖхгвЕЇВЌљ ВъЉВЮђ ВЄавДЅвїђвЦ╝ вЂ╝ВЏї Ж│аВаЋВІюьѓхвІѕвІц.
ВЄа вДЅвїђвіћ вёѕвг┤ Ж╣іВѕЎВЮ┤ вЂ╝Вџ░ВДђ ВЋіЖ│а ВЋйЖ░ё віљВіеьЋўЖ▓ї вЂ╝ВЏЂвІѕвІц.

в░ўвїђВфйВЌљвЈё вЈЎВЮ╝ьЋю в░Ев▓ЋВю╝вАю ВЋъв░ћьђ┤ВЎђ вњив░ћьђ┤вЦ╝ ВА░вдйьЋЕвІѕвІц.
РђІ
ВЋъв░ћьђ┤ВЎђ вњив░ћьђ┤Ж░ђ вфевЉљ ВА░вдйвљўвЕ┤ вг┤ьЋюЖХцвЈёвЦ╝ вЂ╝ВЏїВцЇвІѕвІц.
ВЋъв░ћьђ┤ВЎђ вњив░ћьђ┤ВЌљ вфевЉљ Ж▒ИВ│љВДђвЈёвАЮ ВА░вдйьЋЕвІѕвІц.
[веИвдг ВА░вдйьЋўЖИ░]
Вџ░вЊю ьїевёљВЮў 16в▓ѕ вХђьњѕЖ│╝ Вџ░ваѕьЃё ьїевёљВЮў 17, 18, 19, 20, 21, LEDвЦ╝ Вцђв╣ёьЋЕвІѕвІц.


#16~17. 17в▓ѕ вХђьњѕВЮў ЖхгвЕЇВЌљ LED ВаёЖхгвЦ╝ вЂ╝Вџ░Ж│а,
16в▓ѕ вХђьњѕВЮ┤ в░ћвІЦВю╝вАю Ж░ђЖ▓ї ьЋўВЌг, 17в▓ѕ вХђьњѕВЮў ^ в░ЕьќЦВЮ┤ ВюёвЦ╝ ьќЦьЋўвЈёвАЮ ВА░вдйьЋЕвІѕвІц.

#18~19. 18в▓ѕ вХђьњѕВЮђ 17в▓ѕ вХђьњѕВЮў ВќЉВфйВЌљ ВА░вдйьЋўЖ│а, 19в▓ѕ вХђьњѕВЮђ 17в▓ѕ вДъВЮђьјИВЌљ ВА░вдйьЋЕвІѕвІц.
вфевЊа вХђьњѕВЮў ^ в░ЕьќЦВЮё ВюёвАю ьќЦьЋўЖ▓ї ьЋЕвІѕвІц.

#20. 20в▓ѕ вХђьњѕВЮё ВюЌвЕ┤ВЌљ ВА░вдйьЋўВЌг ВЃЂВъљвЦ╝ вДївЊцВќ┤ВцЇвІѕвІц.

#21. 21в▓ѕ вХђьњѕВЌљ вфЕЖ│хьњђВЮё в░ювЮ╝ 17в▓ѕ вХђьњѕВЌљ вХђВ░ЕьЋЕвІѕвІц.
[вфИВ▓┤ ВА░вдйьЋўЖИ░]

#22~23. 22в▓ѕ вХђьњѕ вЉљЖ░ю ВѓгВЮ┤ВЌљ вфЕЖ│хьњђВЮё в░ювЮ╝ вЉљ Ж░ювАю Ж▓╣В│љ вХЎВЌгВцЇвІѕвІц.РђІ

#23~25. 23в▓ѕ вХђьњѕВЌљ ^ Рєњ ьЉюВІюЖ░ђ Въѕвіћ вХђвХёВЮ┤ Ж▓ЅвЕ┤ВЮ┤Ж│а, вЈїЖИ░Ж░ђ ьЋўвѓўвДї Въѕвіћ ВфйВЮ┤ ВЋъ ВфйВъЁвІѕвІц.
22в▓ѕЖ│╝ 23в▓ѕ вХђьњѕВЮў ьЎћВѓ┤ьЉю в░ЕьќЦВЮ┤ ВЮ╝В╣ўьЋўвЈёвАЮ вДъВХћВќ┤ 22в▓ѕ ВќЉ ВўєВЮў вЈїЖИ░ВЌљ 23в▓ѕ вХђьњѕВЮё Ж░ЂЖ░Ђ вЂ╝ВЏї ВА░вдйьЋЕвІѕвІц.

24в▓ѕ вХђьњѕВЮђ 22в▓ѕВЮў ВЋъ вЕ┤ВЌљ, 25в▓ѕВЮђ вњивЕ┤ВЌљ ВА░вдйьЋЕвІѕвІц.

РђІ26в▓ѕ вХђьњѕВЮђ ВЃЂВъљВЮў ВюЌвЕ┤ВЮё вЇ«Вќ┤ВцЇвІѕвІц.
[вфЕ вДївЊцЖИ░]
27в▓ѕ вХђьњѕ 3Ж░ю, 28в▓ѕ вХђьњѕ 3Ж░ю, 29в▓ѕ вХђьњѕ 2Ж░ю,
3cm ВХЋ ьЋю Ж░ю, 2cm ВХЋ 2Ж░ю, Ж│аВаЋвДЂВЮё Вцђв╣ёьЋЕвІѕвІц.

3cm ВХЋВЌљ Ж│аВаЋвДЂВЮё вЂ╝Вџ░Ж│а 27в▓ѕ РђЊ 28в▓ѕ РђЊ 27в▓ѕ РђЊ 28в▓ѕ РђЊ 27в▓ѕ ВѕюВёювАю вЂ╝ВЏїВцЇвІѕвІц.
ВѓгВДёЖ│╝ Ж░ЎВЮ┤ 27в▓ѕ вХђьњѕЖ│╝ 28в▓ѕ вХђьњѕВЮ┤ ьЋю Вфй ЖхгвЕЇвДї Ж▓╣В╣ўвЈёвАЮ ВЌЄЖ░ѕвдгЖ▓ї вЂ╝ВЏїВцЇвІѕвІц.
ВХЋ в░ўвїђьјИВЌљвЈё Ж│аВаЋвДЂВЮё вЂ╝ВЏї Ж│аВаЋВІюьѓхвІѕвІц.
РђІ
вѓеВЋё Въѕвіћ 28в▓ѕ вХђьњѕВЮё вЉљ Ж░юВЮў 28в▓ѕ вХђьњѕ ВѓгВЮ┤ВЌљ вёБЖ│а
ьЋю ВфйВЌљ Ж│аВаЋвДЂВЮё вЂ╝Вџ┤ 2cm ВХЋВЮё вЂ╝Вџ┤ ьЏё, в░ўвїђьјИВЌљвЈё Ж│аВаЋвДЂВЮё вЂ╝ВЏї Ж│аВаЋВІюьѓхвІѕвІц.

29в▓ѕ вХђьњѕ вЉљ Ж░ювЦ╝ в░ЕЖИѕ ВА░вдйьЋю 28в▓ѕ вХђьњѕВЮў ВќЉ ВўєВЌљ вДѕВДђвДЅ ВХЋВю╝вАю вЂ╝ВЏЂвІѕвІц.
ВХЋ ВќЉ ВфйВЌљвіћ вДѕВ░гЖ░ђВДђвАю Ж│аВаЋвДЂВЮё вЂ╝ВЏї Ж│аВаЋьЋЕвІѕвІц.
[ьЋЕВ▓┤ьЋўЖИ░]

в░ЕЖИѕ вДївЊа вфЕВЮё в»Ивдг вДївЊцВќ┤ вєЊВЮђ веИвдгВЌљ ЖйѓВЋёВцЇвІѕвІц.

РђІвеИвдгВЮў LED В╝ђВЮ┤вИћВЮё вфИьєх ВюЌвЕ┤ВЮў ЖхгвЕЇВЌљ ьЋўвѓўВћЕ вёБВЮђ ьЏё вфЕВЮё вфИьєхВЌљ ЖйѓВЋёВцЇвІѕвІц.
РђІ

LED В╝ђВЮ┤вИћВЮё В░еВ▓┤ВЮў вЕћВЮИв│┤вЊюВЌљ ВЌ░Ж▓░ьЋЕвІѕвІц.
ьЈгьіИВЮў вфеВќЉВЮё ьЎЋВЮИьЋўЖ│а в░ЕьќЦВЮё вДъВХћВќ┤ ЖйѓВЋёВцЇвІѕвІц.

вфИьєх ВЋёвъўВЎђ вњивЕ┤ВЮў вЈїЖИ░вЦ╝ в│ИВ▓┤ВЮў ЖхгвЕЇВЌљ ЖйѓВЋёВцЇвІѕвІц.
ВЮ┤ вЋї вњцВфйвХђьё░ вЂ╝ВЏїВЋ╝ ВА░вдйВЮ┤ ВЅйВіхвІѕвІц.


[ьїћ вДївЊцЖИ░]
30в▓ѕ вЉљ Ж░ю(вѓўвеИВДђ ьЋўвѓўвіћ ВЌгВюавХёВъЁвІѕвІц), ВєљЖ░ђвЮй вёц Ж░ю, ВХЋ вЉљЖ░ю, Ж│аВаЋвДЂ вёц Ж░ювЦ╝ Вцђв╣ёьЋЕвІѕвІц.

30в▓ѕ вХђьњѕВЮў ВєљЖ░ђвЮй вХђвХё ВќЉВўєВЌљ ВъЉВЮђ ВєљЖ░ђвЮй вХђьњѕ вЉљЖ░ювЦ╝ Ж│аВаЋвДЂВю╝вАю Ж│аВаЋьЋЕвІѕвІц.
Ж░ЎВЮђ в░Ев▓ЋВю╝вАю ВќЉ ьїћВЮё вДївЊГвІѕвІц.

в░ЕЖИѕ ВА░вдйьЋю ьїћВЮў ЖхгвЕЇВЮё вфИьєх ВќЉ ВўєВЌљ Въѕвіћ вЈїВХю вХђВюёВЌљ вЂ╝ВЏЂвІѕвІц.
ЖхгвЕЇВЮў вњц ВфйВЮё ве╝Вађ вЂ╝Вџ░Ж│а Вѓ┤ВДЮ вІ╣ЖИ░вЕ┤Вёю вЂ╝ВЏїВцЇвІѕвІц. ВЮ┤ вЋї ьїћВЮ┤ В░бВќ┤ВДђВДђ ВЋівЈёвАЮ ВБ╝ВЮўьЋЕвІѕвІц.
[ВіцьІ░В╗ц вХЎВЮ┤ЖИ░]
ВЋёвъўВЎђ Ж░ЎВЮ┤ Ж░Ђ ВіцьІ░В╗цВЮў ВюёВ╣ўвЦ╝ ьЎЋВЮИьЋўВЌг вХђВ░ЕьЋЕвІѕвІц.
A : веИвдг
B : вѕѕ
C : вфЕ ВЋёвъў
D : вфИьєх ВюЌвХђвХё
E : вфИьєх ВЋёвъў
G : вЊ▒
H : в│ИВ▓┤ вњивЕ┤
F : ВќЉ ьїћ



вАюв┤Є Вйћвдг ВА░вдй ВЎёВё▒!
ВЮ┤Ваю ВА░ВбЁЖИ░вЦ╝ вДївЊцВќ┤ в│╝Ж╣їВџћ?
в░ћвАюЖ░ђЖИ░ >>> RC вІгьЃљВѓг вАюв┤Є Вйћвдг вДївЊцЖИ░ 4 РђЊ ВА░ВбЁЖИ░














